
この記事では、映画「沈黙の艦隊」の内容を踏まえ、次の内容について論じます。
- 潜水艦は他艦の位置を正確に把握することができない。
- 映画では、潜水艦が他艦を探知すると画面に位置が表示され、リアルタイムに位置を把握することが出来る。
- しかし、潜水艦が使用するセンサーはほとんどがパッシブセンサーで、方位しか測定することが出来ない。
- アクティブソーナーは、潜水艦の命である隠密性を損ねることに直結するため、潜水艦は使用しない。
- 潜水艦は、目標運動解析(TMA)を行うことで、方位線から目標の位置・運動を推定している。
- ただし、解析には時間が掛かり、必ず解析誤差が生じる。
- 目標が変針・変速した場合は、解析をやり直さないといけない。
- ただし、解析には時間が掛かり、必ず解析誤差が生じる。
- 潜水艦は他艦と連絡を取り合うことが難しく、相手の位置を正確に把握することも難しいため、衝突回避が困難
- そのため、現代の潜水艦が他艦と行動を共にすることはほとんどない。
- 事前に決められた担当エリアを厳守することで他艦との衝突を防止していると思われる。


 募集対象者 京井 未来
募集対象者 京井 未来他に、あの映画で変なところってあったんですか?
 水雷長 遠見1尉
水雷長 遠見1尉そりゃあ、まぁ探せばいくらでもあるけど、フィクションの軍事描写にケチを付けるなんて、一番つまらないことだとボクは思うよ。
……とはいえ、挙げるとすれば「位置の把握」かなぁ。
位置を正確に把握できない、ということ。
募集対象者 京井 未来位置……ですか?
水雷長 遠見1尉そう。別に「沈黙の艦隊」に限ったことではないんだけど、映画だと他の艦が出現すると、画面上にすぐその艦のアイコンが表示されて、リアルタイムに位置情報が更新されていくでしょ?
あれ、水上艦艇ですら結構難しくて、潜水艦だとほぼ不可能なんだ。
募集対象者 京井 未来あら、そうなんですか。
水雷長 遠見1尉そもそも、探知した目標が本当に「●●」という艦なのかなんて、そう簡単に確証を得ることはできないからね。目視でその艦だと確認できた目標や、データリンクで位置情報を共有している味方艦なんかは、間違いないと言えるだろうけど、そうでもなかったら「●●の可能性のある目標」にしかならないんだ。
募集対象者 京井 未来そうか……、敵艦だと思ってたら実は全く関係ない艦だったって可能性は残るんですね。確かに探知と同時にどの艦です、っていうのは難しそうです。
広告
潜水艦が分かるのは「方位」だけ
水雷長 遠見1尉でも、潜水艦の場合はさらに難しい。どうしてかと言えば、そもそも潜水艦は他の艦の位置を正確に把握することが出来ないからなんだ。
募集対象者 京井 未来あれ?確かにレーダーは使えないと言ってましたけど。ソーナーで位置を掴めるんじゃないんですか?
水雷長 遠見1尉ソーナーはソーナーでも、潜水艦が使用するのはパッシブソーナーだけなんだ。
募集対象者 京井 未来パッシブソーナーって……、音を受信するだけのソーナーでしたっけ?
水雷長 遠見1尉そう。自分から信号を送信してその反響音を検出するのがアクティブソーナー。それに対して自分から音を出さずに外から入ってくる信号を待ち受けるのがパッシブソーナーなんだ。
アクティブなら、送信から受信までの時間差を計測することで相手までの距離を測ることが出来るんだけど、パッシブの場合はただ受信するだけだから距離を測ることが出来ないんだ。
募集対象者 京井 未来どうしてアクティブを使わないんです?
水雷長 遠見1尉それは、潜水艦にとって最大の利点である隠密性を損なってしまうからだよ。
アクティブソーナーって探知距離自体は決して長くないんだけど、送信音自体ははかなり遠距離まで伝搬してしまうんだ。一番よろしくないのは、海底に敷設されたハイドロフォンにキャッチされてしまうことだね。複数地点で受信されてしまうと、方位線の交点付近に潜水艦が所在することがバレてしまうから、そこに哨戒機を派遣されてあっという間に位置を特定されてしまうんだ。
水雷長 遠見1尉昔の潜水艦は、それでもアクティブソーナーが無いと周囲の状況が分からないから慎重に使っていたんだけど。最近の潜水艦は、そもそもアクティブソーナーを装備していないか、装備していても原則として使わないんだ。
募集対象者 京井 未来レーダーはどうなんです?
水雷長 遠見1尉レーダーも同じ。自分から電波を発射すれば位置を特定されてしまうから、装備はしているだろうけど使う事はほとんど無いはず。
電波を受信するESMは使ってると思うけど、これはパッシブセンサーだから、やっぱり方位しか得ることが出来ない。
広告
TMAで位置を推定
募集対象者 京井 未来しかし、それでは周りの艦の位置が分からないでしょう?そんな状態でどうやって敵と戦うんですか?
水雷長 遠見1尉そこで大事になってくるのが目標運動解析(TMA: Target Motion Analysis)なんだ!
 水雷長 遠見1尉
水雷長 遠見1尉確かに、その時その時に入ってくる探知情報は方位線だけかもしれない……。でも、その方位線だって、時間を掛けて観察すれば相手の位置を推定することが出来るようになるんだ。
TMAの考え方
 水雷長 遠見1尉
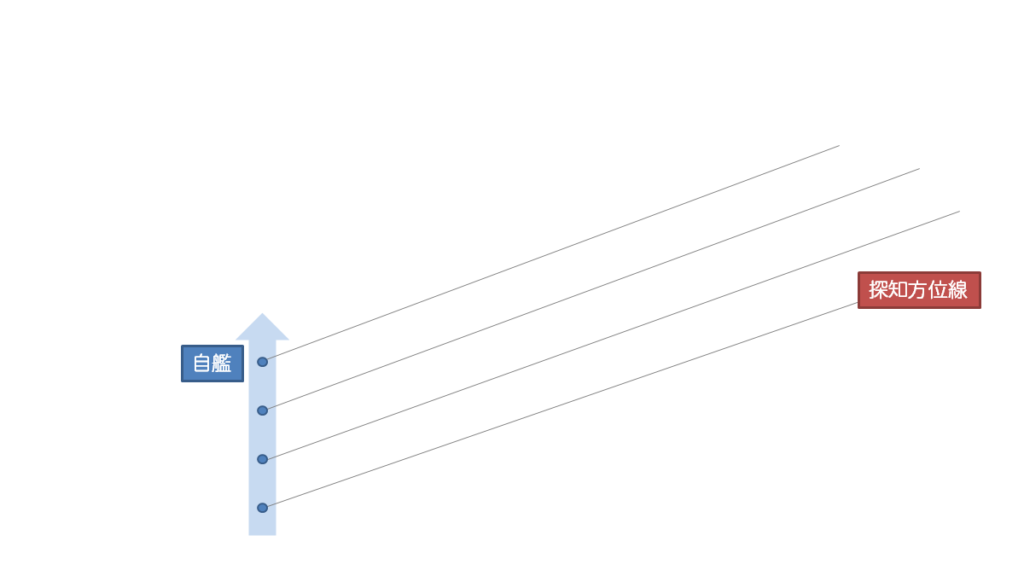
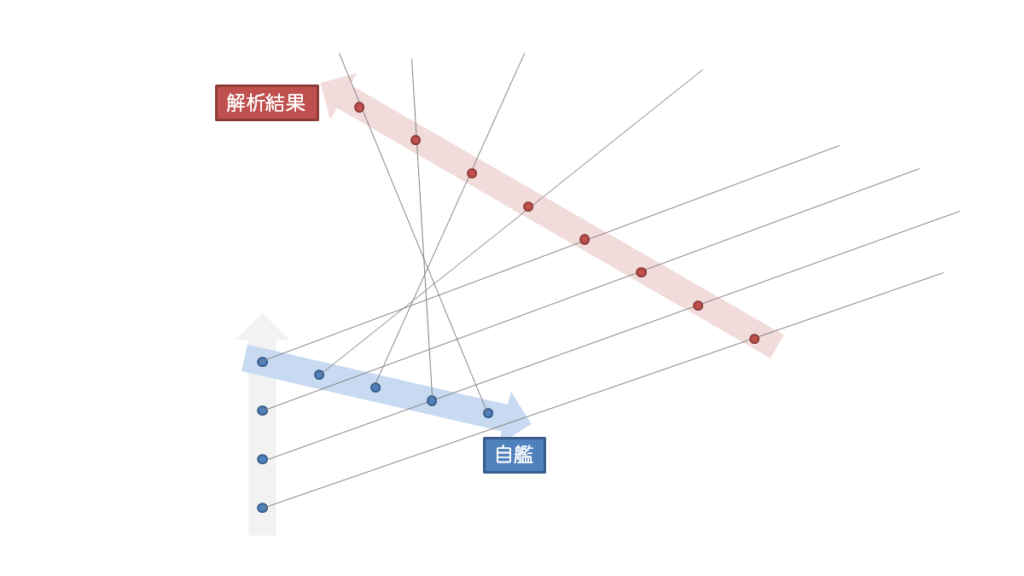
水雷長 遠見1尉TMAは探知方位線を記録するところから始まるんだ。
上の図の場合、青い点が自艦で上方向へ進んでいる。目標の信号は右上方向から入ってきていて、時間経過してもあまり探知方位はあまり変わらないという状況。
募集対象者 京井 未来当然ですが、この時点では敵艦の位置は全く分かりませんね。
 水雷長 遠見1尉
水雷長 遠見1尉そして解析する。
解析手法には色んな種類があって、的速(目標の速力)を仮定した上で方位変化率を方程式に放り込む手法や、ドップラー効果による周波数変化を利用するものなど様々。
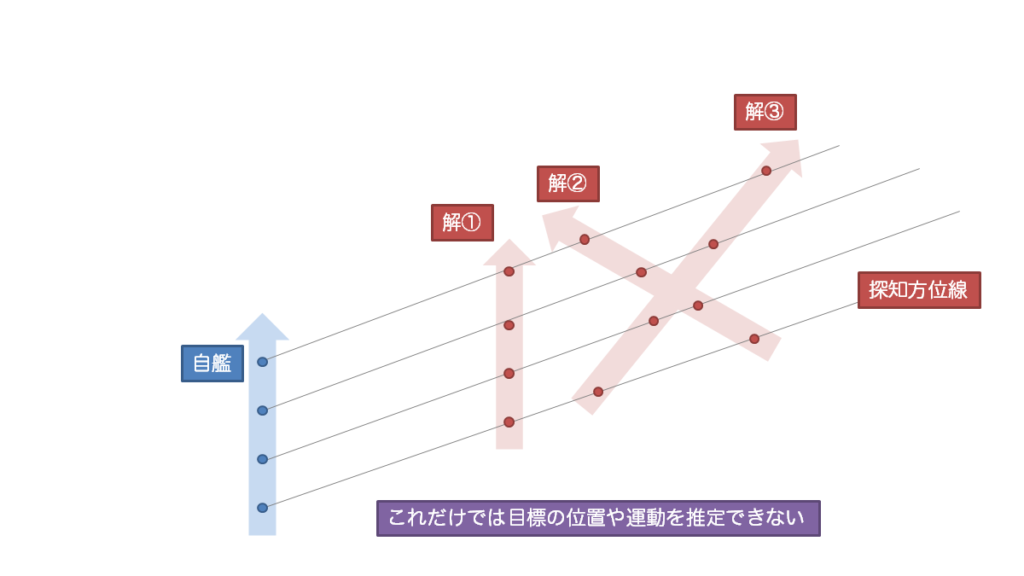
その中でも原始的ながらバカに出来ないのが、方位線上に等速運動の点を置く手法。目標が変針変速していない、という前提に立てば、方位線は等速運動している点の上を通っているはず。これを利用すれば、ある程度、目標の運動を絞り込むことが出来るんだ。
募集対象者 京井 未来でも、上の図だと絞り込めてないように見えますが……
水雷長 遠見1尉そう、上の図の場合、探知方位線の方位変化がほとんど起きていないから、推定できないんだ。
方位変化がほとんど起きていない場合はいくつかの可能性があって、
①自艦と針路速力がほとんど同じ
②自艦と斜同航(向きは概ね同じだが、若干斜め)で速力が早い
③あまりにも遠距離過ぎて方位変化がほとんど起きていない
ってところかな。
水雷長 遠見1尉とは言え、潜水艦が出す速力というのはかなり限られている。
ディーゼル潜水艦の場合、10ノット以上の速力で走り続けるのはかなりしんどいし、原子力潜水艦でも被探知のおそれを考えればあまり高速で走り続けるわけにはいかない。
少なくとも、解析結果の的速が30ノットを超えているようなら、多分解析が間違っていると推定できるよ。
 水雷長 遠見1尉
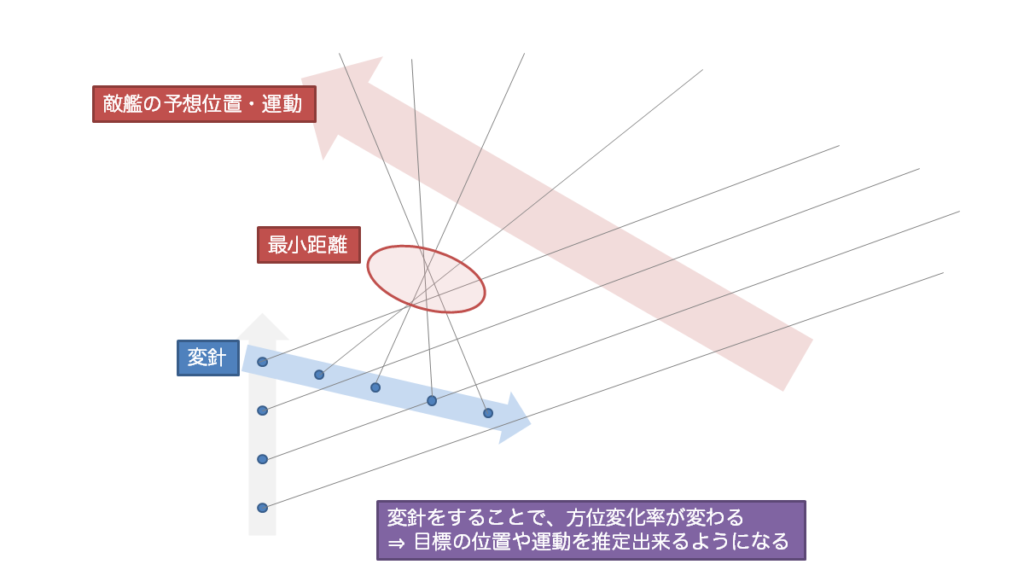
水雷長 遠見1尉ここで大事になってくるのが変針。
方位変化が得られないなら、自分の運動を変えてやれば、自ずと方位変化が得られるようになるんだ。
募集対象者 京井 未来本当だ。方位変化が全然違うものになりましたね。
水雷長 遠見1尉上の図の場合、自艦が変針したことで、ひとつ明確になったことがあるんだ。それが、敵艦の最小距離。
変針後の方位変化が非常に急激になっていることから、反航(自艦と相手艦がすれ違う状態)であることが推定できる。そして、的速が0、つまり停止状態であった場合の目標位置は方位線の交点になる。
募集対象者 京井 未来なるほど、交点より手前に敵艦はいないことが分かるんですね。
水雷長 遠見1尉そう。そして遠ざかるほどに的速が増えるから、最大距離もある程度は決まってくる。その間で、左上方向に向かって進んでいることが分かるんだ。
 水雷長 遠見1尉
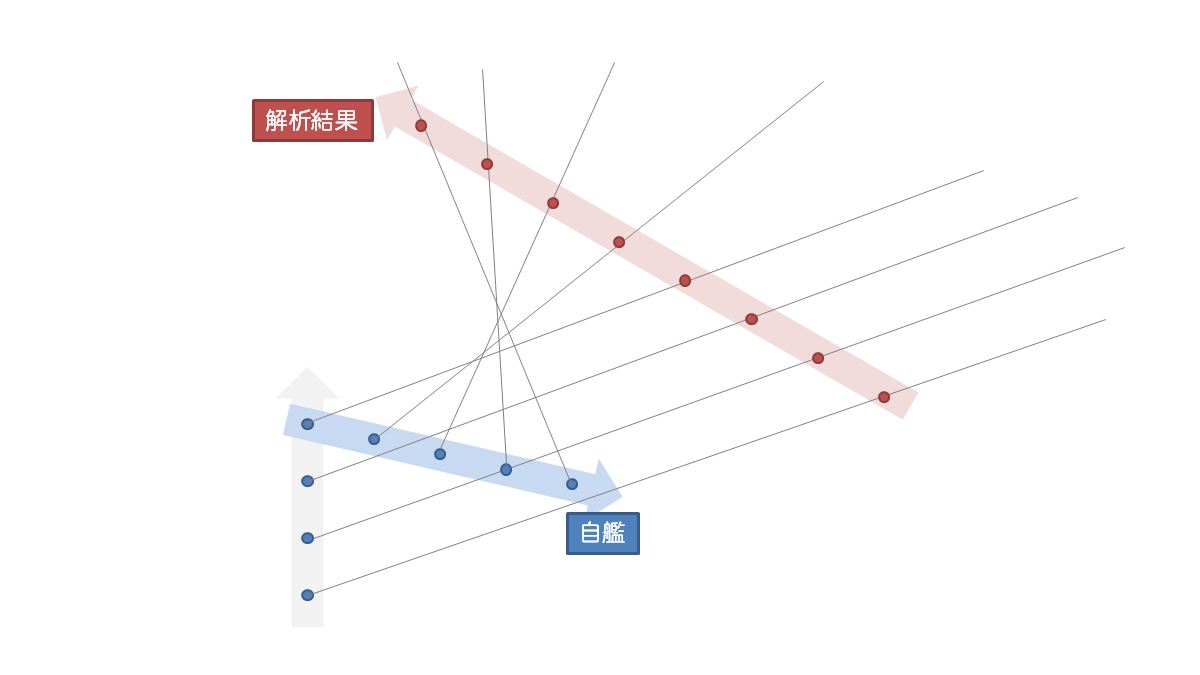
水雷長 遠見1尉最終的には、上の図が解析結果として算出されることになる。
変針前の方位線と変針後の方位線、これをうまく活用すれば目標の位置と運動を求めることが出来るんだ。
募集対象者 京井 未来分かりました。しかしこれ、総当たりでやるんですか……?
水雷長 遠見1尉そう。手でやるのはあまりにしんどい。そこで、最近のソーナーシステムはこういう解析を自動でやる機能が搭載されているんだ。
他にも、米海軍で用いられているのはElelund Rangingと呼ばれる手法。さっき言った「方位変化率を方程式に放り込む手法」ってやつで、これを使うことで目標の距離を推定することが出来るんだ。
距離を推定できれば、そこを通るパターンだけ考えればいいから、かなり解析が楽になる。
そうやって、システムによる自動解析とオペレーターによる手動解析を組み合わせて、もっともらしい解析結果を求めていくのがTMAなんだ。
募集対象者 京井 未来なるほど……。
方位線だけでも、かなりのことが分かるんですね。
このTMA、弱点はあるんですか?
水雷長 遠見1尉まあ、今言ったとおり、解析にはかなりの手間と時間が掛かる。ということは、探知してすぐ距離が分かるってわけにはいかないよね。
加えて、こうしたTMAの前提にあるのは相手が変針も変速もしていないこと。もし、相手が変針変速してしまったら、解析をやり直さないといけないんだ。
募集対象者 京井 未来確かに。
水雷長 遠見1尉それから、解析誤差が生じることも忘れてはいけない。
方位変化によって推定する手法であるから、そもそも信号の方位誤差が大きいと解析誤差も大きくなるし、変針を挟んでも明確な方位変化が出ない相手も苦手なんだ。具体的には①遠距離の目標、②速力が非常に遅い目標、③自艦を向いている/自艦と反対方向を向いている目標だね。
広告
衝突回避が困難
水雷長 遠見1尉ここまで分かってくると、映画の中でもう一つおかしいところに気がつくと思う。
募集対象者 京井 未来うーん……?相手の位置が分からないと困ること、ですよね?
水雷長 遠見1尉答えは、複数の潜水艦が同じ海域で行動していること。
募集対象者 京井 未来あっ、そうか。位置が分からないということは、あんな映画みたいに潜水艦同士がすれ違ったり出来ないんですね。
水雷長 遠見1尉そういうこと。詳しくはまた説明するけど、そもそも潜水艦は外界と通信する手段が乏しくて、潜っている間は基本的に孤立無援なんだ。
そこに加えて、相手の位置を正確に把握できないとなると、衝突回避出来ないワケ。
「沈黙の艦隊」でも、密集した潜水艦同士が衝突するシーンがちらほら出てくるんだけど、そりゃあ、狭い海域に集まればそうもなるよなと。
募集対象者 京井 未来……ということは、潜水艦は単独で行動するってことですか?
水雷長 遠見1尉基本的にはそうなるね。
訓練のために、支援する艦艇と一緒に動くということはあるけど、作戦のために潜水艦同士が併走するというのは非常にリスキーでまずやらないと思う。
大戦期は「群狼戦術」と言って、複数の潜水艦で船団を包囲して代わる代わる襲撃するという戦法が採られたりしたけど、あの当時の潜水艦は敵に見つかるまでは浮上してたし。冷戦期はソ連が複数艦での連携戦術をやっていたらしいけど、現代の潜水艦でそれをやってもデメリットばかりで、ほとんどメリットは無いね。
募集対象者 京井 未来でも、1隻で広い海を守ってる訳じゃないんですよね?
水雷長 遠見1尉もちろん。同時に1隻しか出港しないなんてことはないし、海に境界はないから、何かしら対策を打たないといけない。そうなれば考えられるのは、事前に各艦の担当エリアを決めて、原則そのエリアから逸脱しないようにさせることだと思うよ。
募集対象者 京井 未来なるほど……。自分のエリアに潜水艦が自分しかいないって状態を作っておけば、少なくとも味方と衝突するのは防げますね。
水雷長 遠見1尉相手の位置が分からないっていうことが、どれだけ潜水艦の動きに影響しているか、分かってくれたかな?
募集対象者 京井 未来よく分かりました。
なかなか不便なものですね……。
この記事では、映画「沈黙の艦隊」の内容を踏まえ、次の内容について論じます。
- 潜水艦は他艦の位置を正確に把握することができない。
- 映画では、潜水艦が他艦を探知すると画面に位置が表示され、リアルタイムに位置を把握することが出来る。
- しかし、潜水艦が使用するセンサーはほとんどがパッシブセンサーで、方位しか測定することが出来ない。
- アクティブソーナーは、潜水艦の命である隠密性を損ねることに直結するため、潜水艦は使用しない。
- 潜水艦は、目標運動解析(TMA)を行うことで、方位線から目標の位置・運動を推定している。
- ただし、解析には時間が掛かり、必ず解析誤差が生じる。
- 目標が変針・変速した場合は、解析をやり直さないといけない。
- ただし、解析には時間が掛かり、必ず解析誤差が生じる。
- 潜水艦は他艦と連絡を取り合うことが難しく、相手の位置を正確に把握することも難しいため、衝突回避が困難
- そのため、現代の潜水艦が他艦と行動を共にすることはほとんどない。
- 事前に決められた担当エリアを厳守することで他艦との衝突を防止していると思われる。






コメント